T-FLEX Динамика[1] - это программный продукт, позволяющий производить динамические расчёты и анализ пространственных механических систем.
Модель механизма описывается как система твёрдых тел, шарниров и нагрузок, создаваемая на основе трёхмерной геометрической модели T-FLEX CAD и сопряжений. Решатель программы учитывает масс-инерционные характеристики тел трёхмерной модели. Для описания системы, решаемой в системе T-FLEX Динамика, используется специальный объект модели - задача "Анализ движения". Он содержит в себе набор элементов модели, нагрузок и других элементов, задающих их взаимодействие. В «задаче» содержатся данные, задающие направление силы тяжести, свойства элементов задачи по умолчанию (свойства шарниров, силы трения, контактные свойства), временные характеристики моделируемого процесса. Задач может быть несколько. Каждая из задач может содержать свой набор элементов и граничных условий для нахождения решения в различных постановках или при различных нагрузках. Задача ассоциативно связана с трёхмерной моделью. При изменении параметров или состава модели автоматически происходят соответствующие изменения и в задаче.
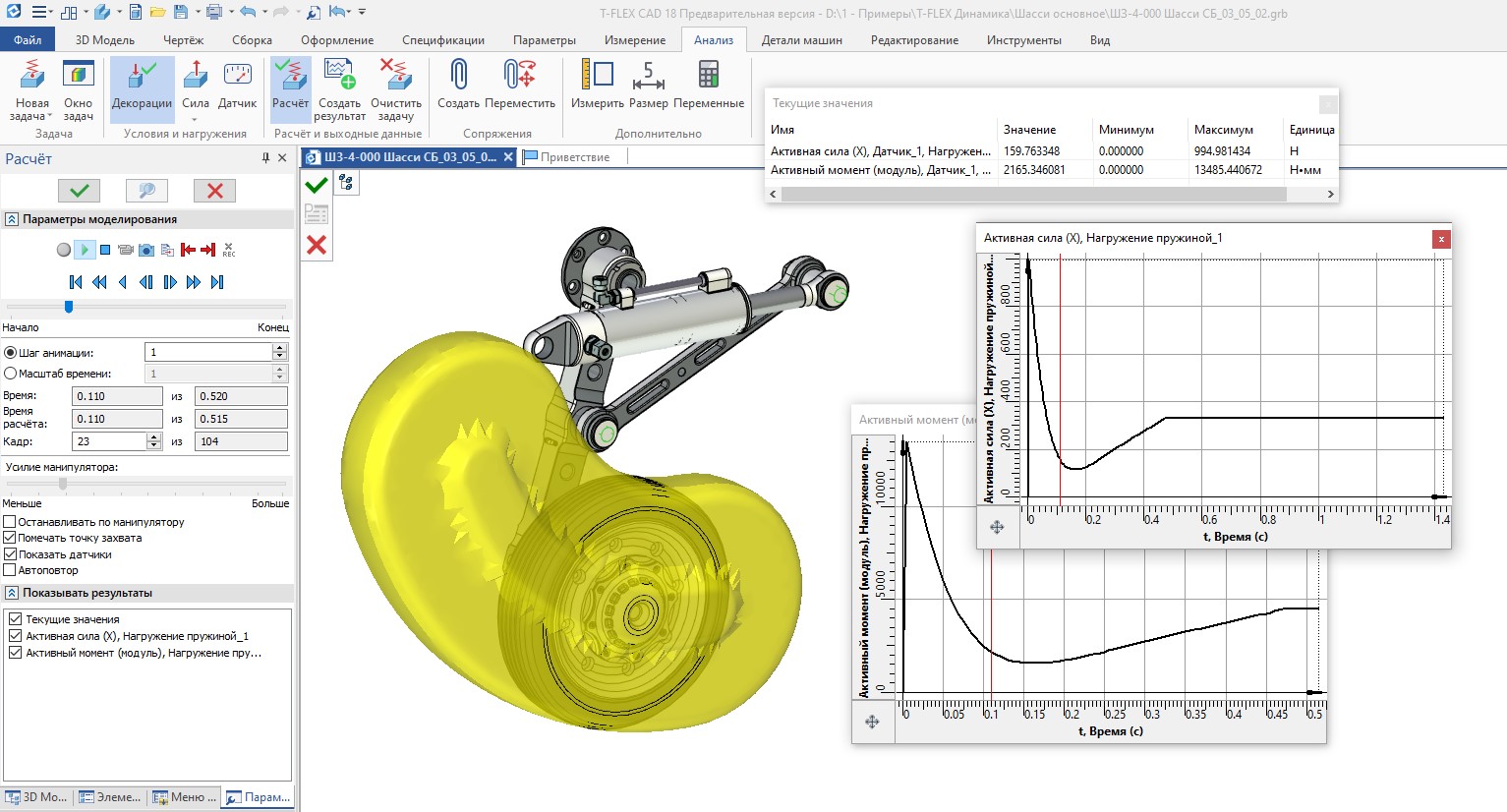
Рисунок 1.
Для задания связей между трёхмерными телами используются сопряжения и степени свободы. На их основе система формирует список шарниров. Шарниры характеризуются геометрическими параметрами (размерами), коэффициентами трения.
В качестве нагрузок для тел можно задать начальные линейные и угловые скорости, силы, моменты, пружины, гравитацию и т.д. Величины нагрузок могут задаваться в виде константных величин или значений переменных, а также в нелинейном виде, при помощи графических зависимостей. Кроме этого, можно задавать зависимость величины нагрузки от значения, измеряемого датчиком. К примеру, можно задать зависимость крутящего момента мотора от скорости его вращения. Данная возможность позволяет описывать динамическую систему наиболее реалистично, так как большинство взаимосвязей в механических системах являются нелинейными.
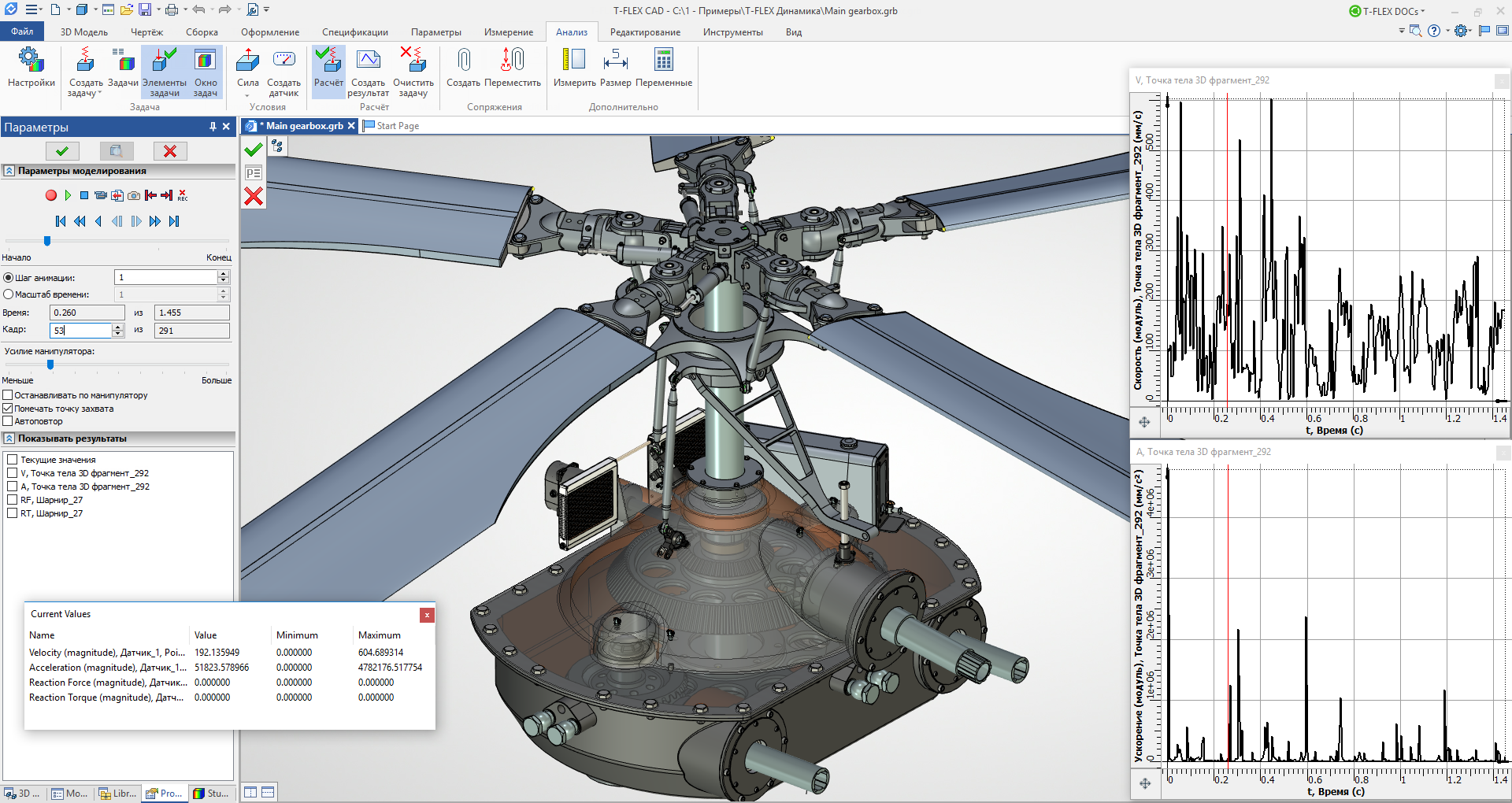
Рисунок 2.
| Минимальные | |
|---|---|
|
Операционная система: |
Windows 7 x64 (с Пакетом обновлений 1) |
|
Процессор: |
Intel или AMD с поддержкой SSE3 |
|
Объем оперативной памяти: |
4 Гб |
|
Объем свободного дискового пространства: |
3 Гб |
|
Видеокарта: |
видеокарта с поддержкой OpenGL 3.3 и выше |
| Рекомендуемые | |
|
Операционная система: |
Windows 10 x64, 11 x64 |
|
Процессор: |
Core i5 или выше |
|
Жёсткий диск: |
SSD накопитель |
|
Объем оперативной памяти: |
16 Гб и больше |
|
Видеокарта: |
высокопроизводительная видеокарта NVIDIA или AMD с памятью 1Гб и выше и поддержкой OpenGL 4.2 и выше |
Приобретая любой продукт комплекса T-FLEX PLM, вы получаете возможность его бессрочного использования.
Для получения информации о стоимости продукта T-FLEX Динамика и о программных продуктах комплекса T-FLEX PLM, обращайтесь в офис компании «Топ Системы» или воспользуйтесь формой «Обратная связь».
[1] Предыдущие и (или) альтернативные названия программного обеспечения:
Информация о наличии у АО "Топ Системы" исключительных прав на вышеуказанную программу для ЭВМ: Свидетельство о государственной регистрации № 2011618727
Программа для ЭВМ включена в Единый реестр российских программ для электронных вычислительных машин и баз данных: № в Реестре 1818
Способ предоставления права использования указанной программы: права использования предоставляются путем предоставления простой неисключительной лицензии на основании лицензионных договоров и лицензионного соглашения.





